Skip to content
Anne Smith – New Plymouth Artist
Art By Anne Smith
Scroll down to content
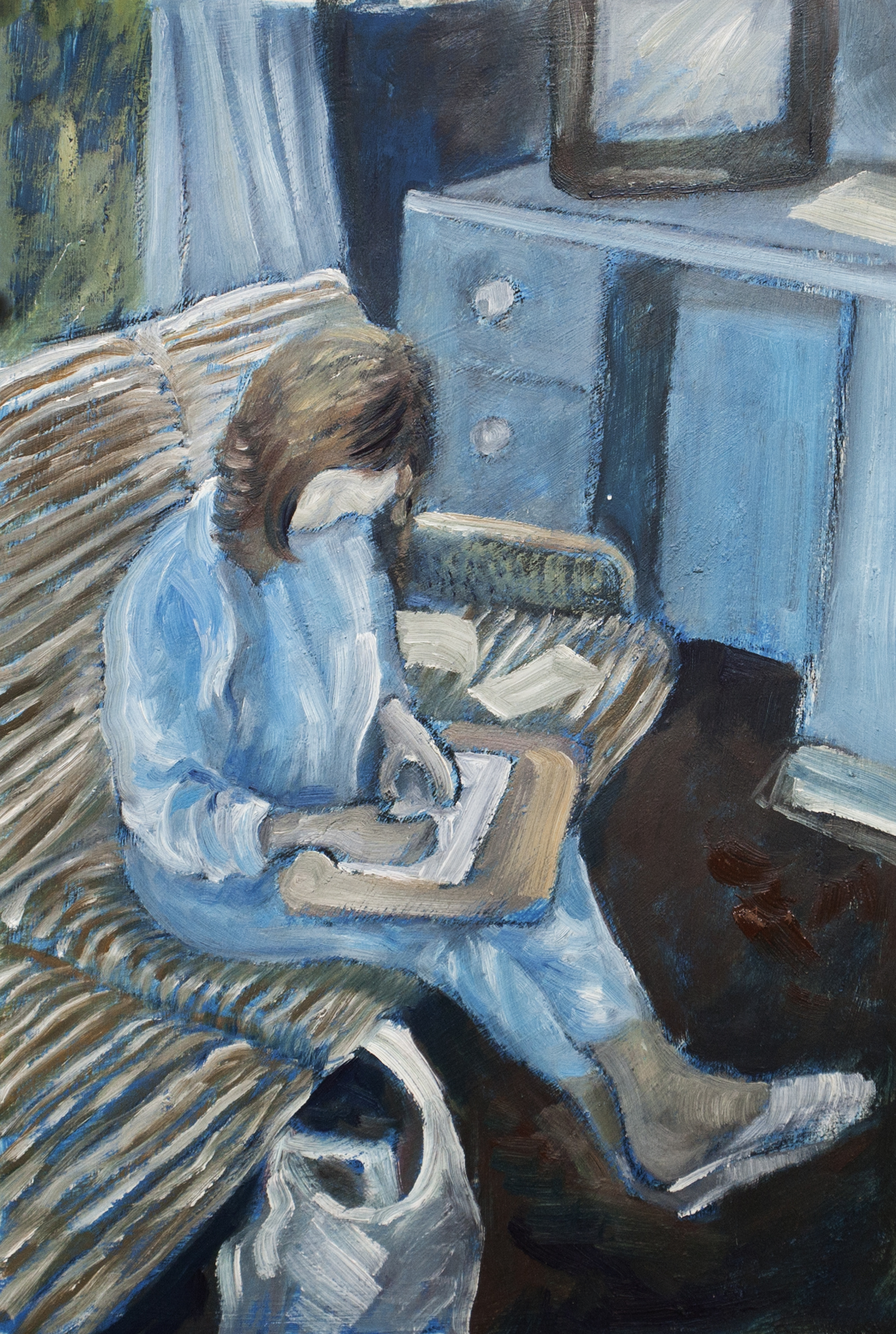
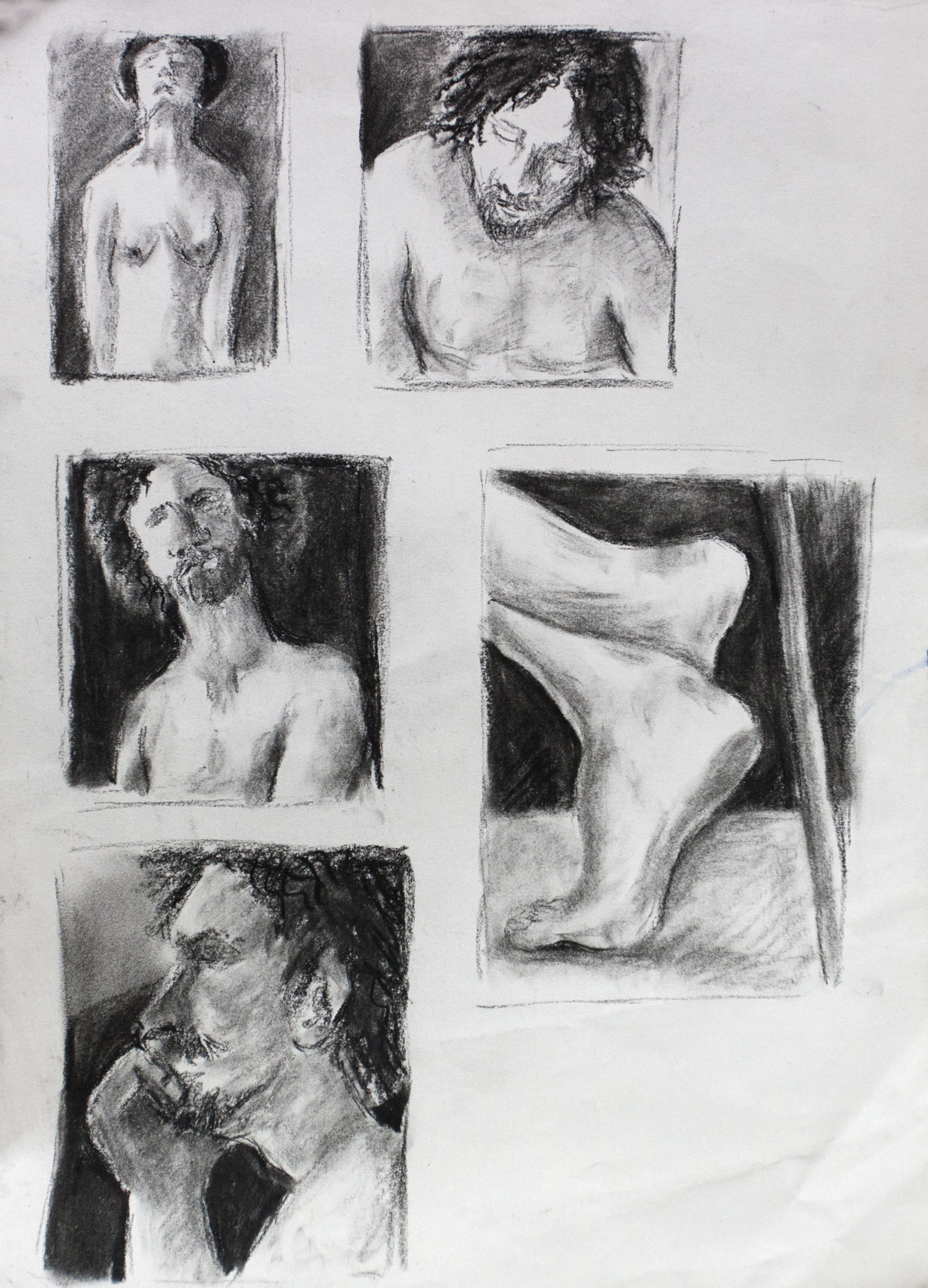
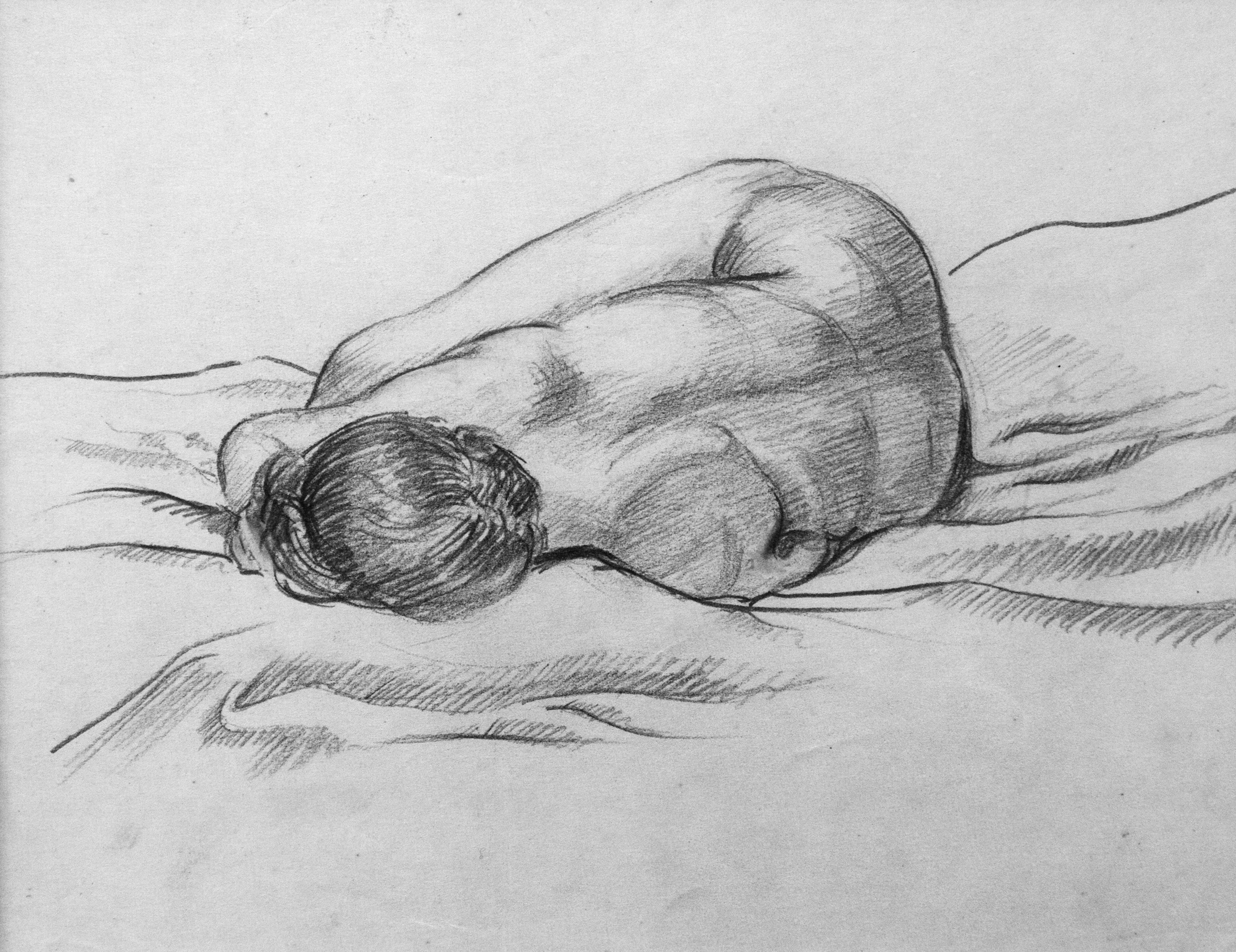
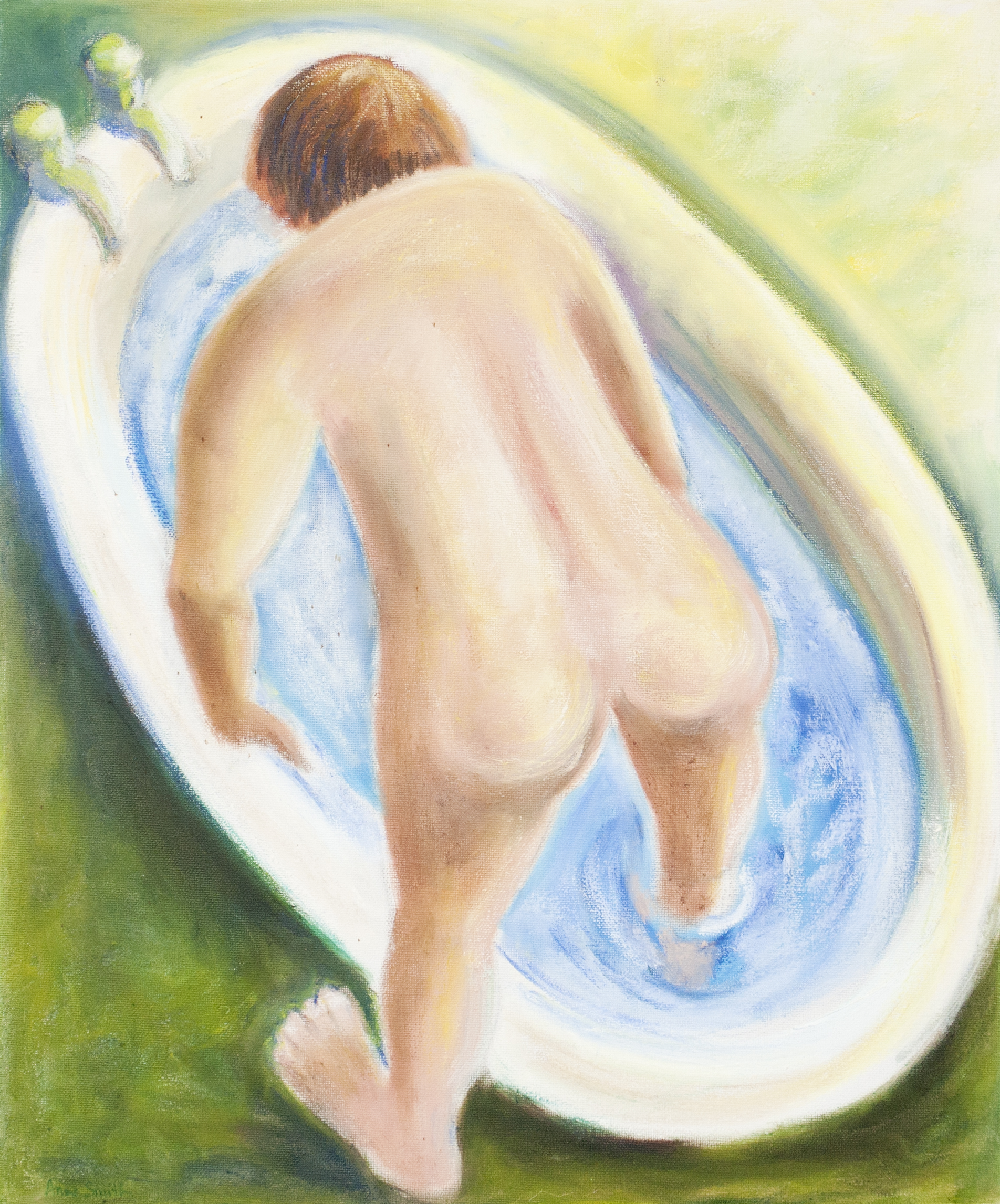
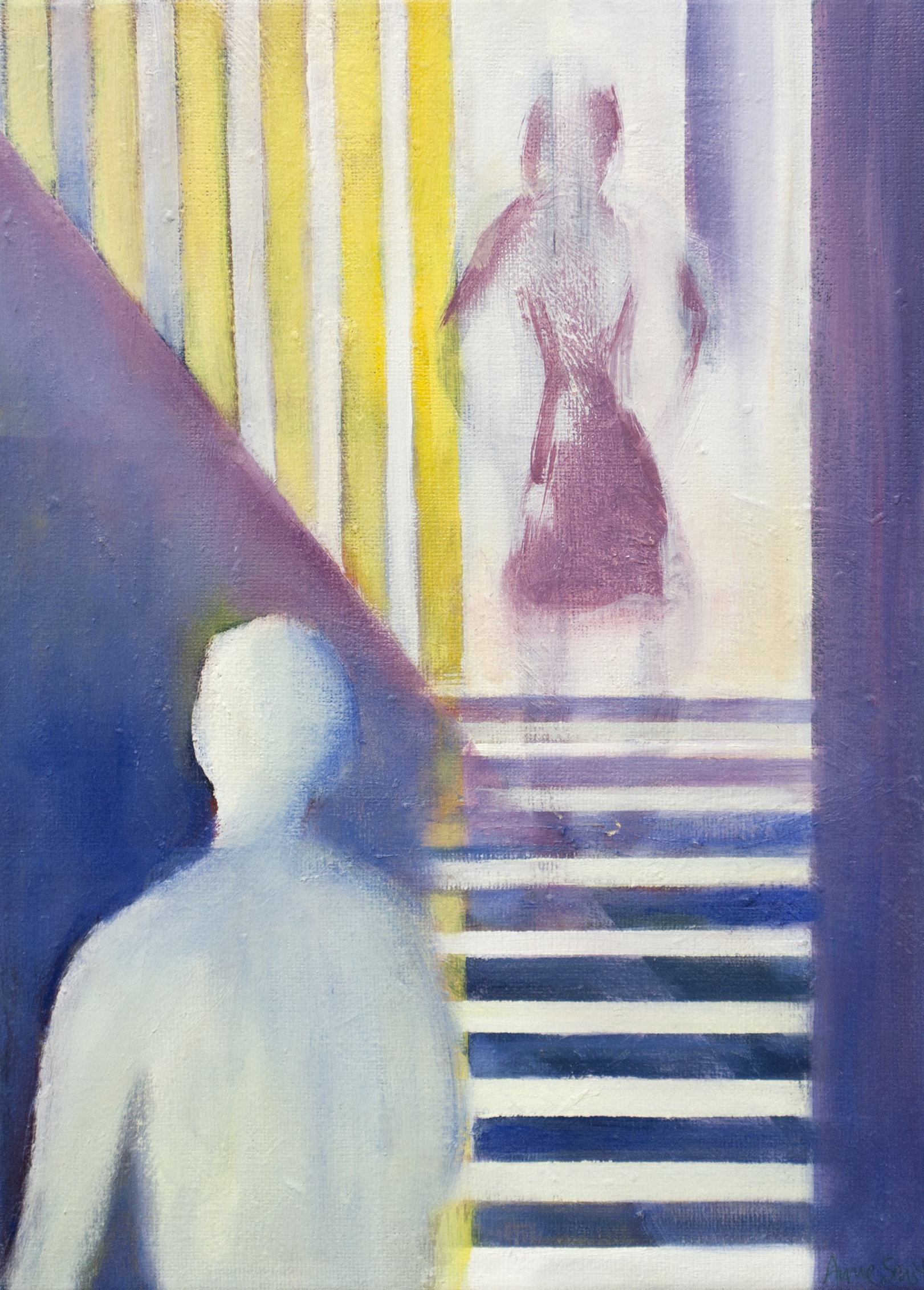
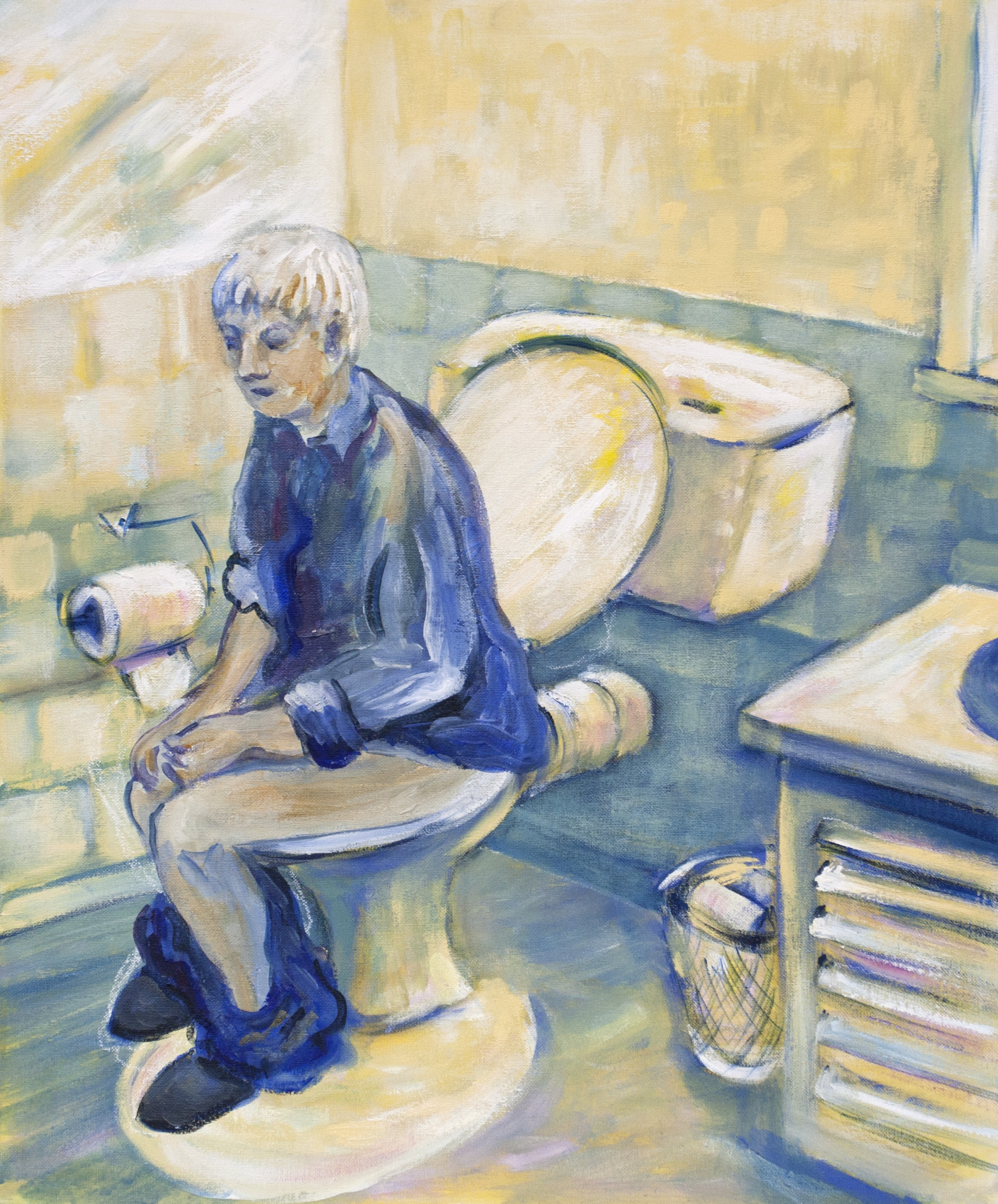
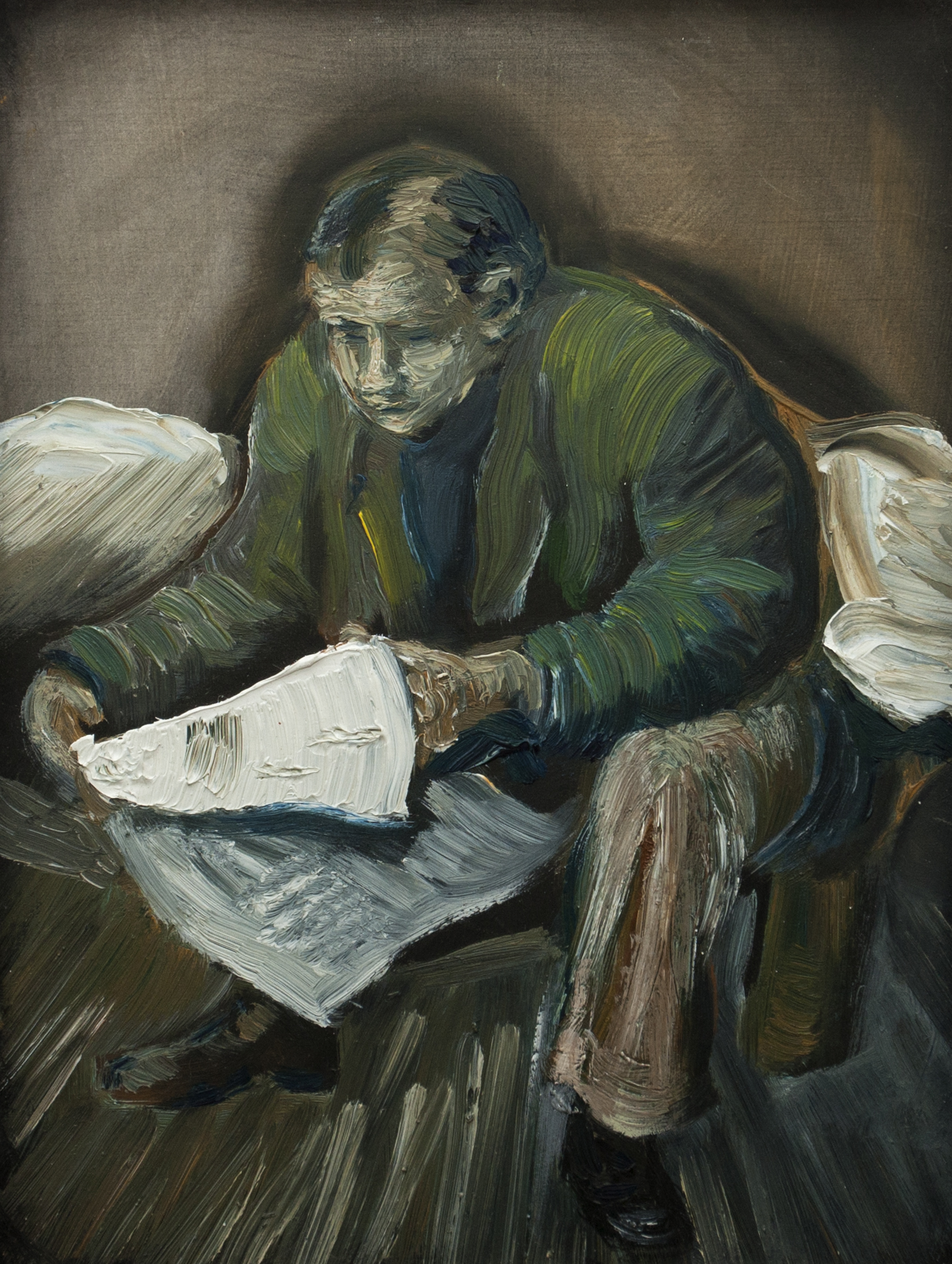
Portraits
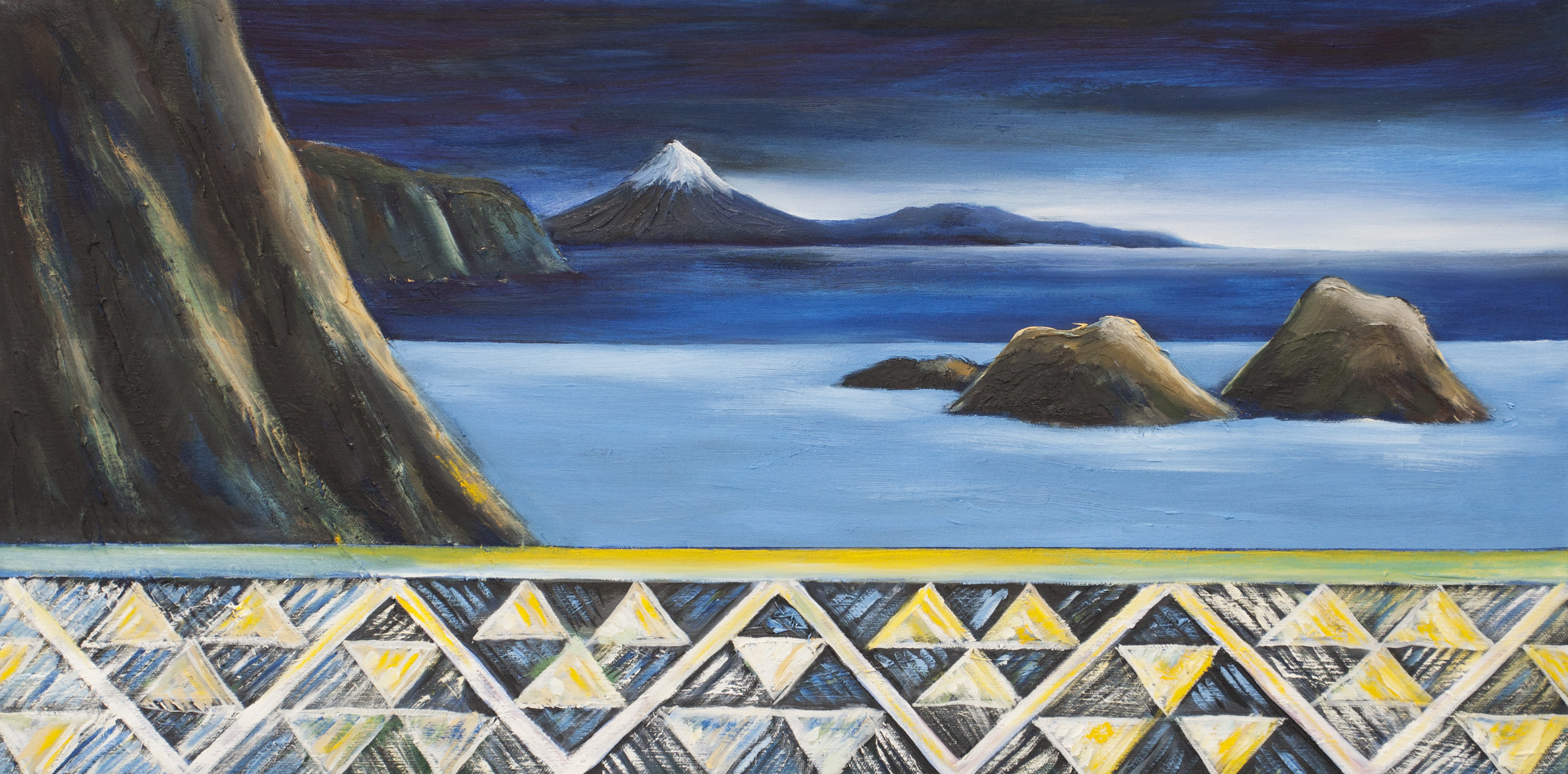
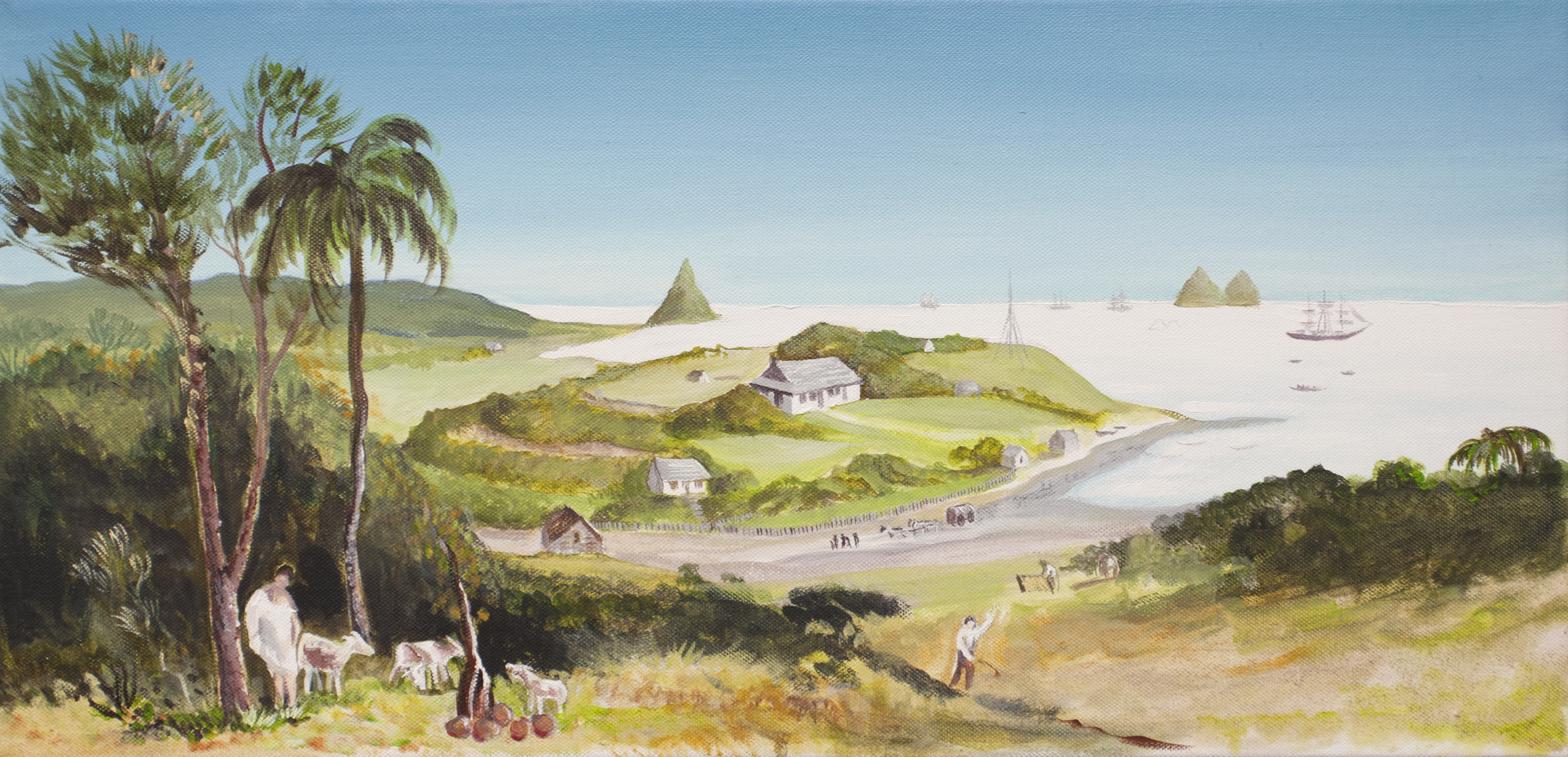
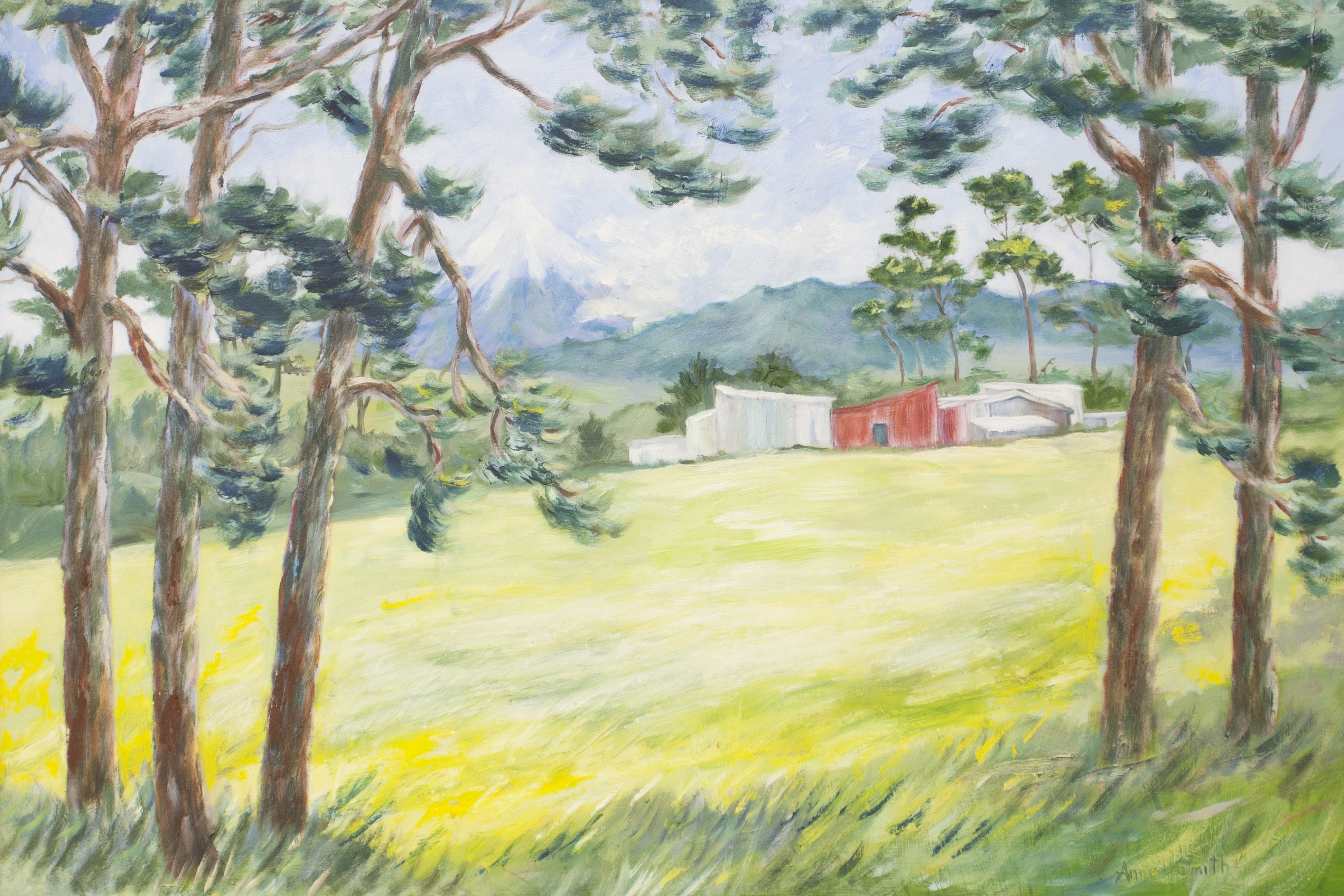
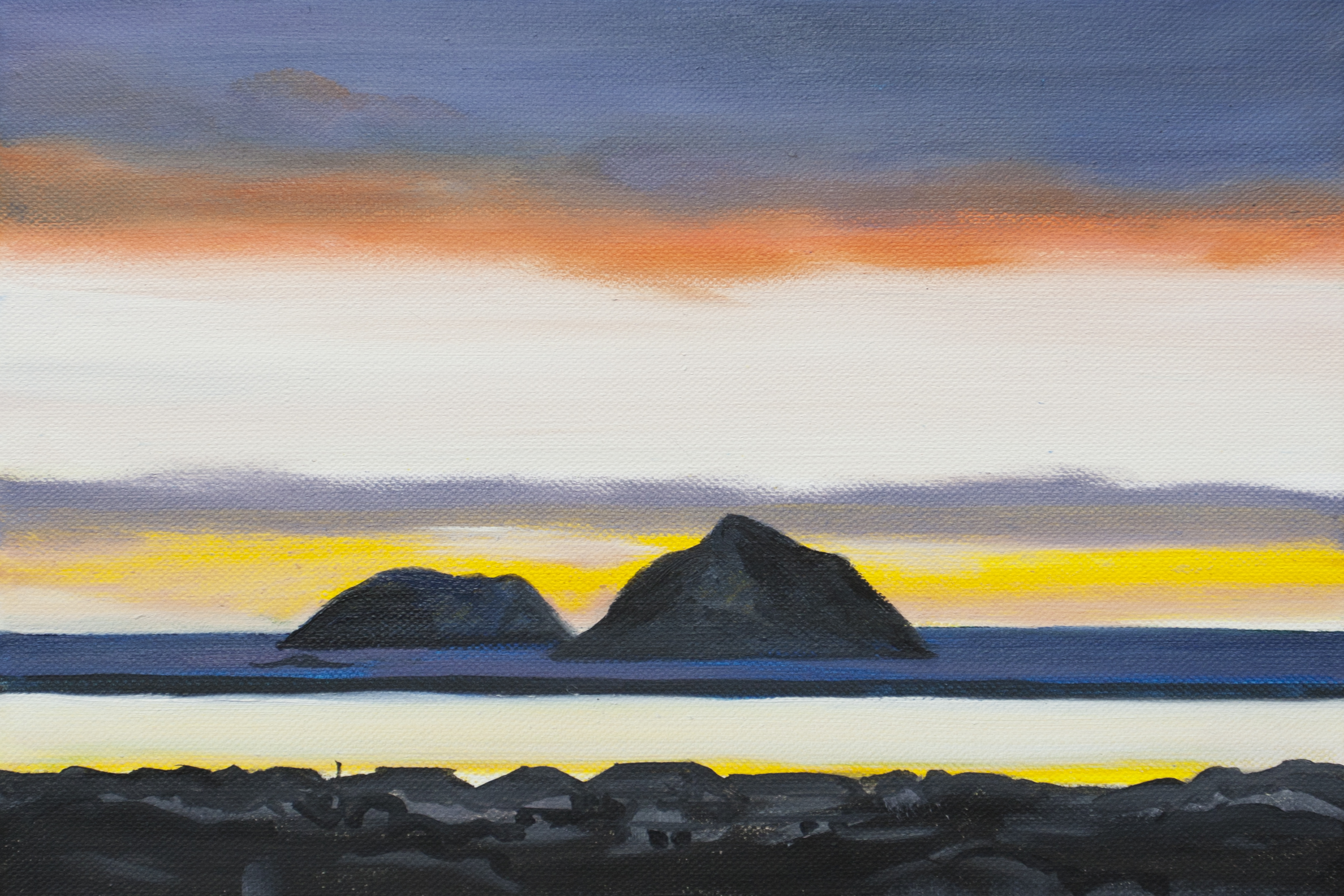
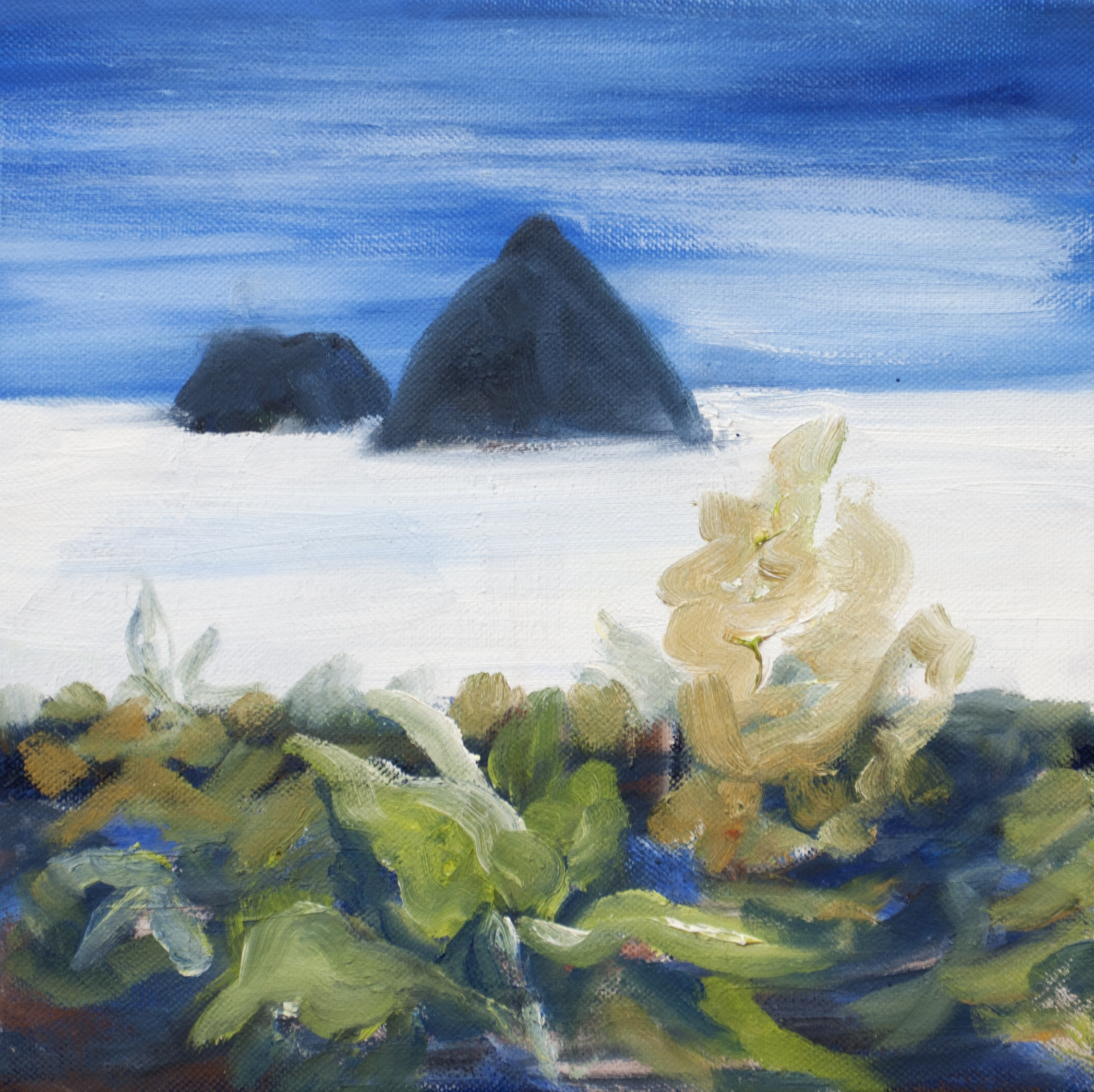
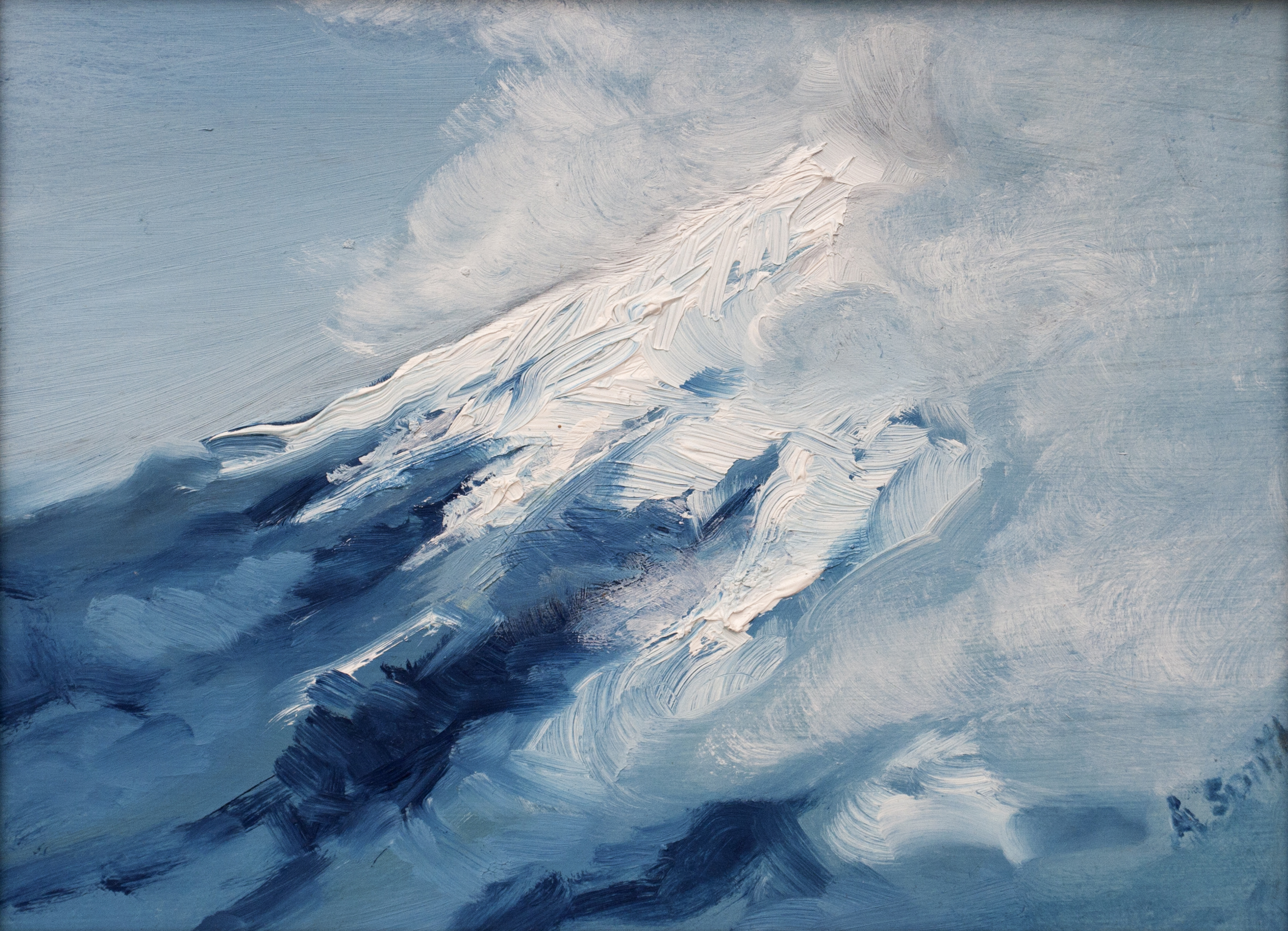
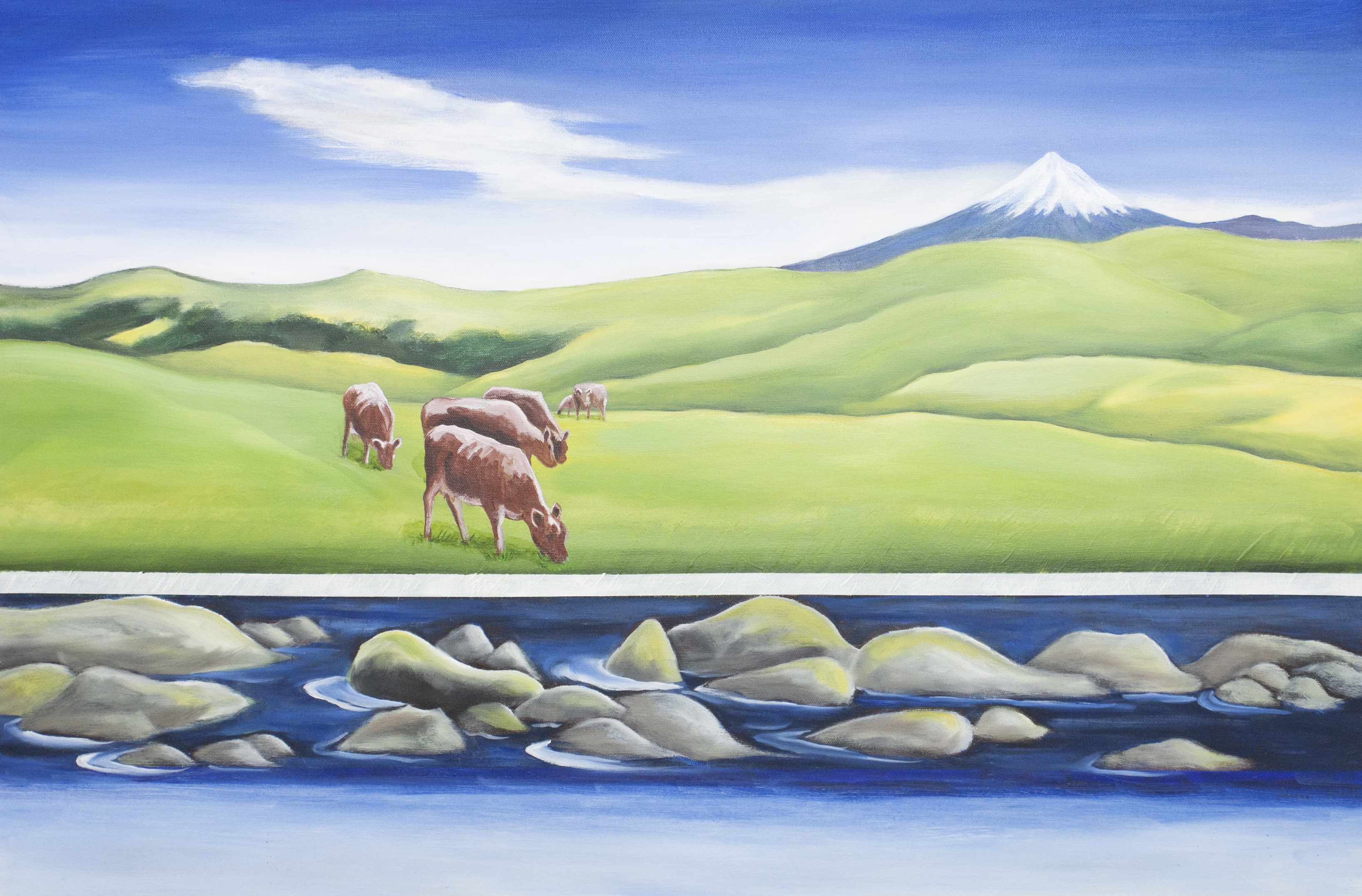
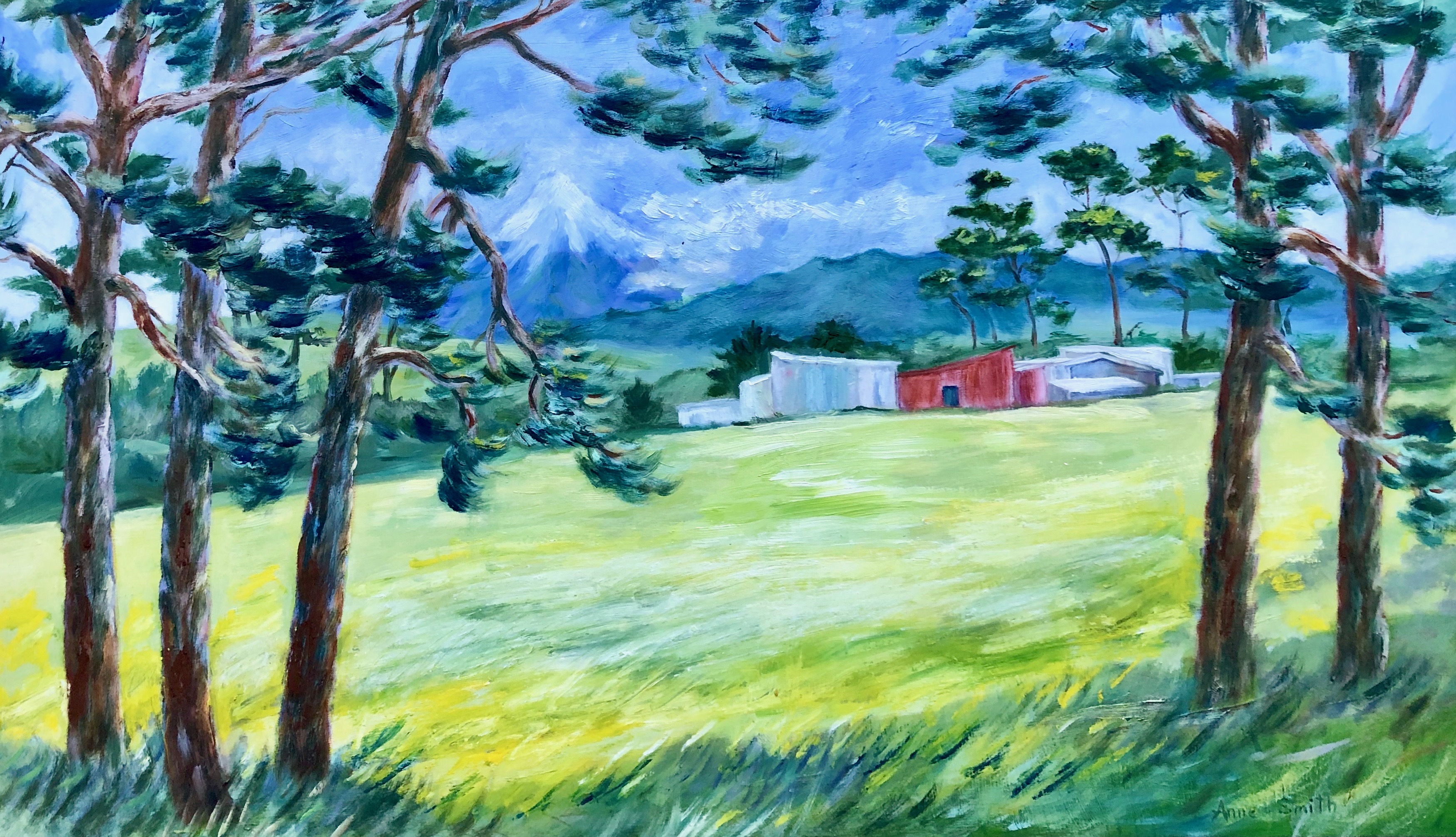
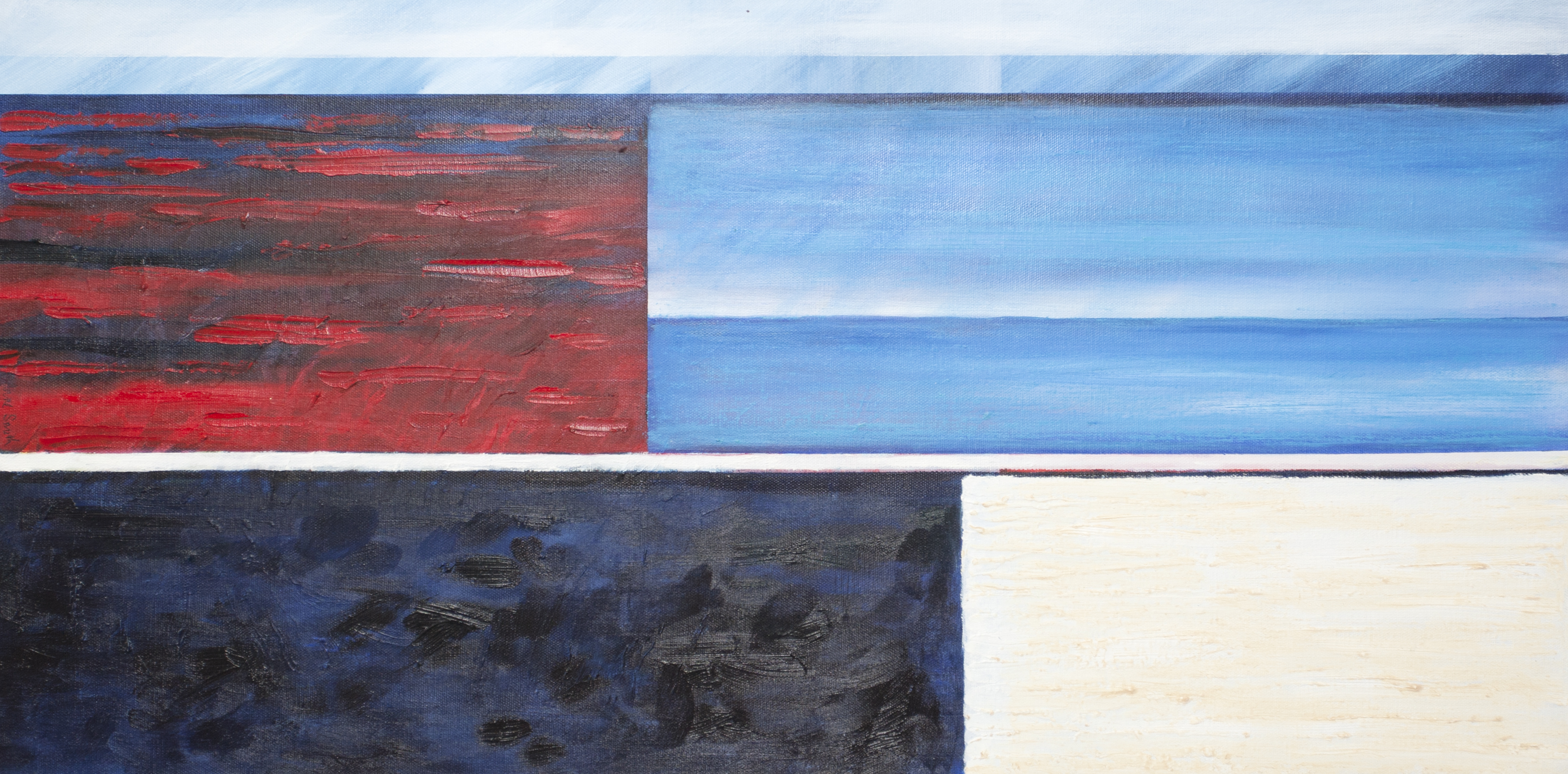
Landscapes
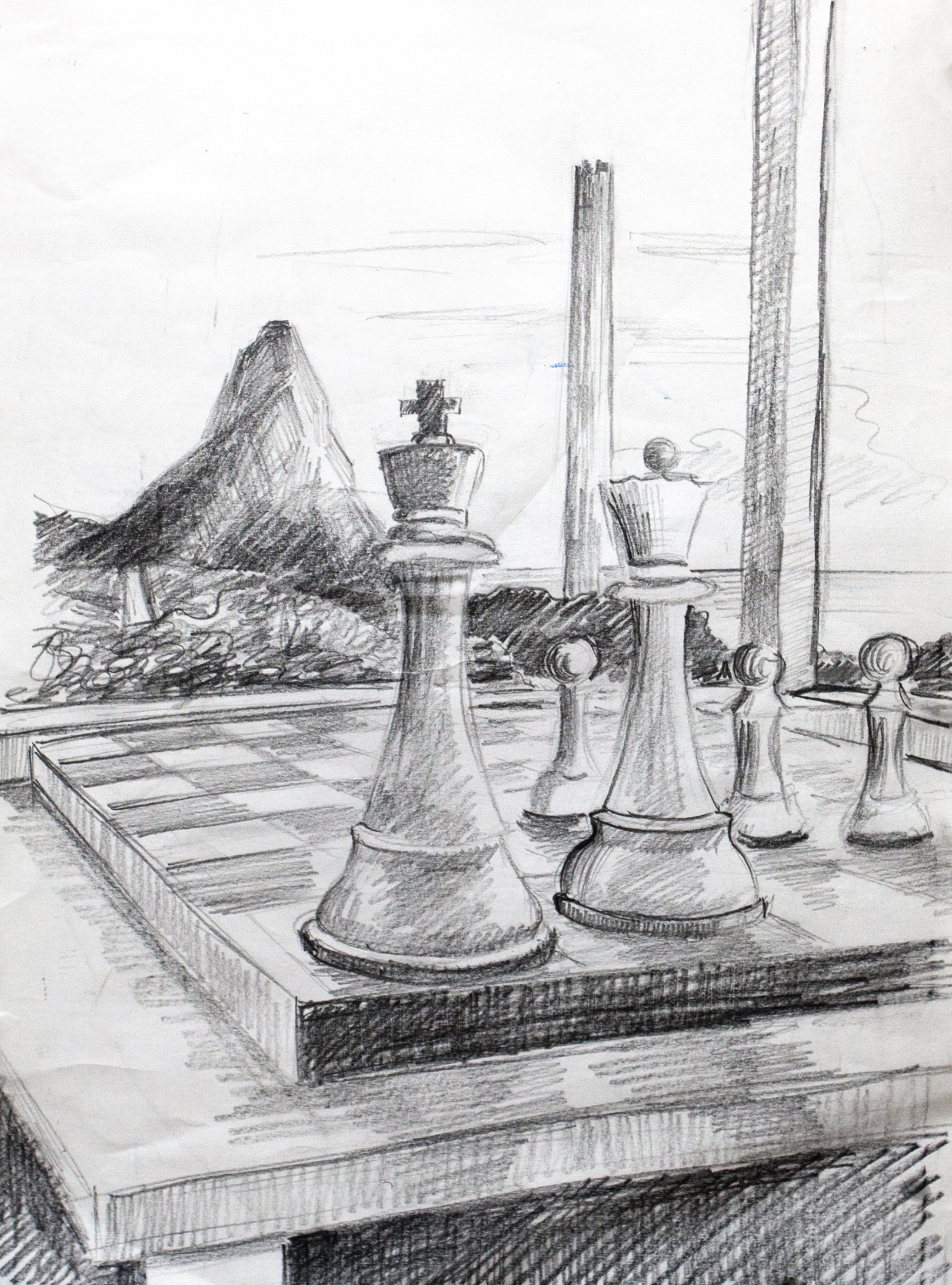
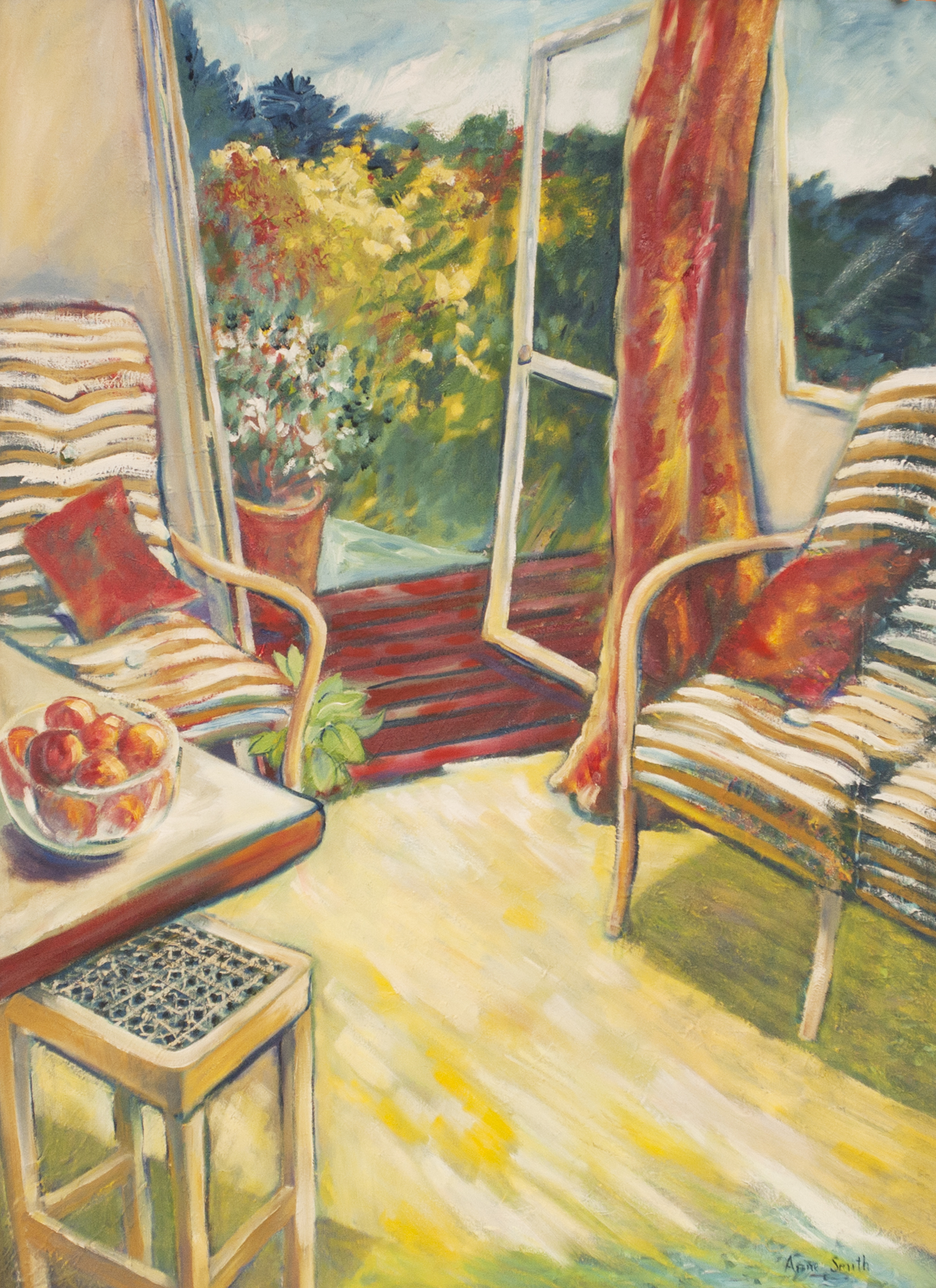
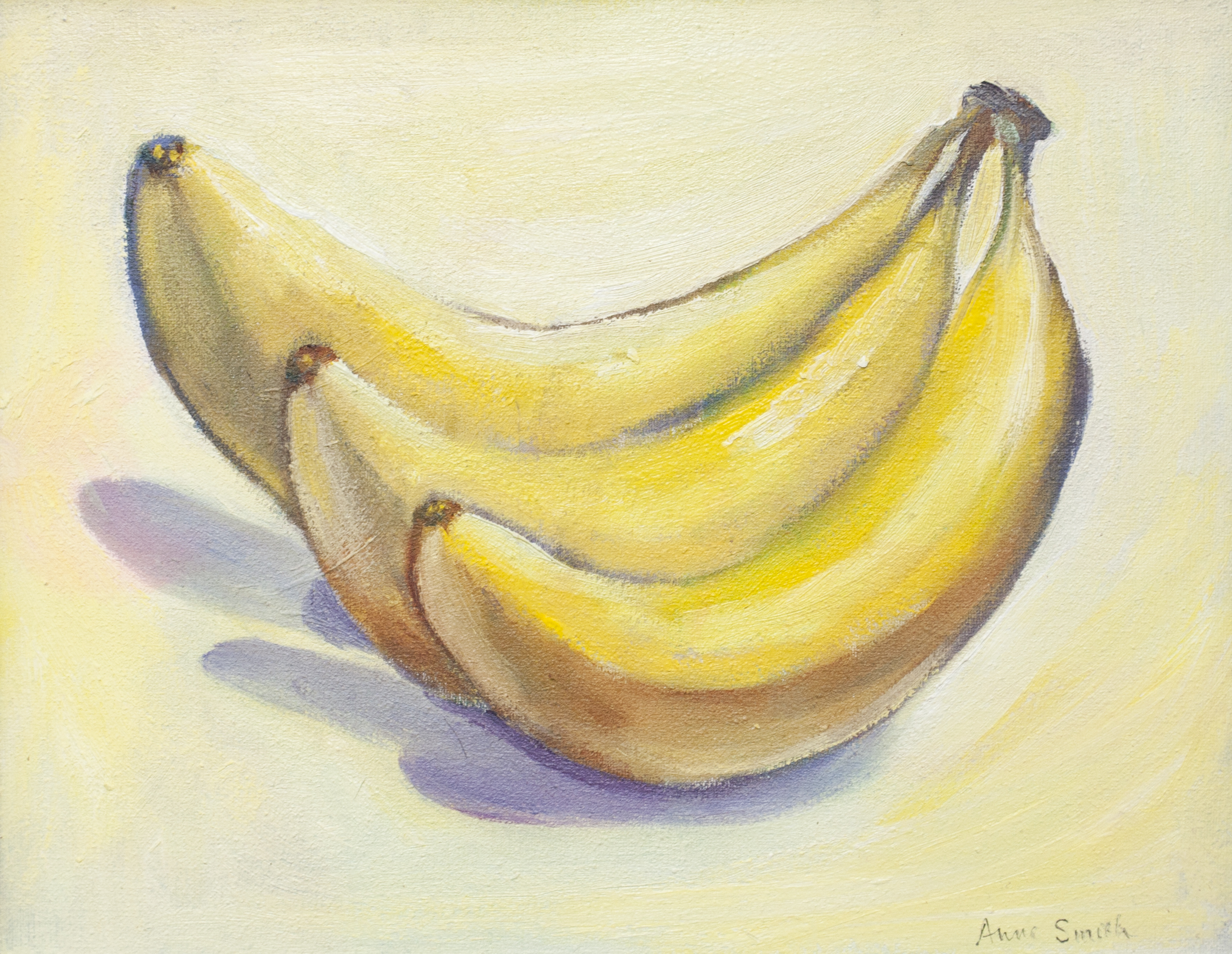
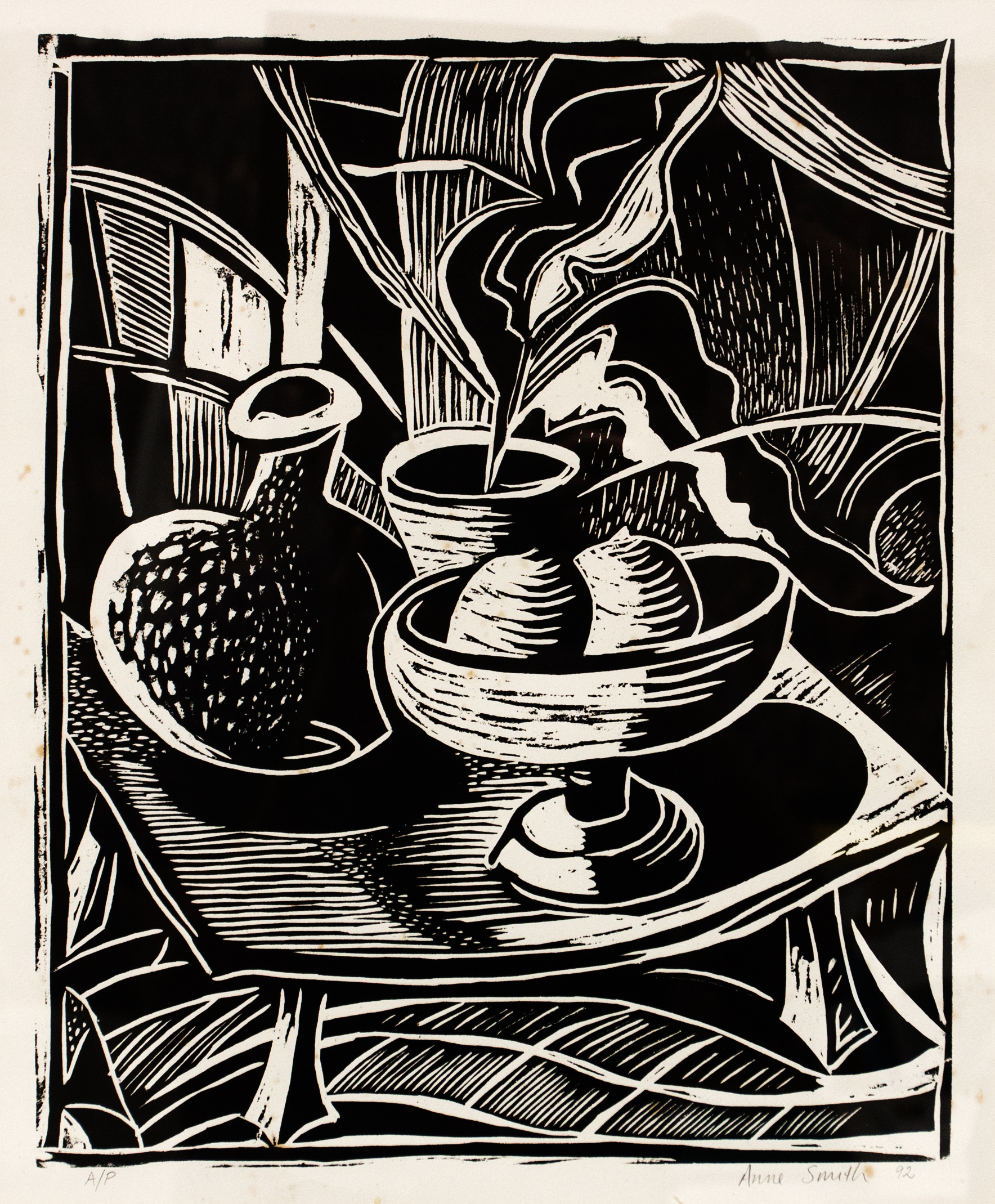
Still Life